
Racing Drone
This project represents my abilities in 2019
Overview
Over the summer of 2019, a couple of my friends and I set out to make our own racing drones from scratch. These racing drones are small quadcopters with 5 inch propellers that can go upwards of 90mph, and are flown using first person view googles relaying a video feed from the drone. I learned a lot about electronics from this project, including soldering and motor driver calibration.
Hardware
These drones are comprised of many components that need to be compatible with one another. After much research, I sourced my components and began the build. The first step was mounting the motors and flight controller to the frame, and then soldering the motors to the ESC board. This was easily the hardest portion of the build, as the solder contacts on the flight controller were both tiny and located right next to each other. After much trial and error, the flight controller was soldered to the motors, camera, receiver, video transmitter, and XT60 battery connection.


Version one of the drone on its 3D printed frame
Software
Once the quad was soldered and built, the next step was flashing and configuring the flight controller. This required loading the appropriate drivers onto my computer, and connecting to the board via a COM port. Once my computer was able to communicate with the flight controller, I could configure and calibrate the ESC motor controllers, and setup serial communication between my remote controller and the drone. Much of this needed to be done in the command line of the BetaFlight software.
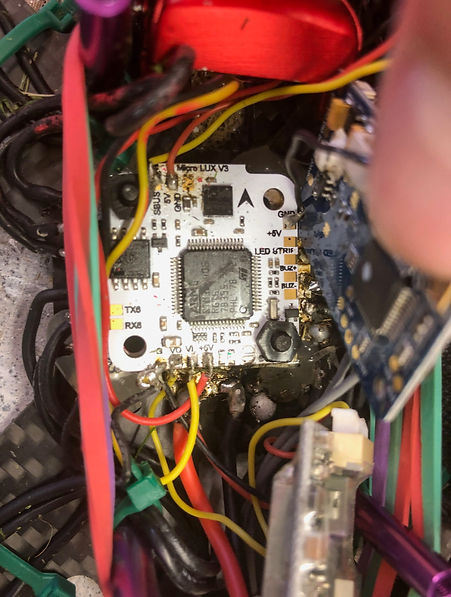
The flight computer of the drone, which needed to be programmed with the correct firmware after all of the components were soldered on
Results
After many late nights, the drone was finally ready to fly. I took it to a local football field and practiced flying in ACRO mode.
Flight 1
Flight 2

The final configuration of the second version of my drone
